


Notícia Patrocinada – Por João Marcelo Corrêa*
 A startup Novarum Sky lançou uma nova solução para Georreferenciamento Direto (GD) para uso em drones de asas fixas ou rotativas para possibilitar mapas georreferenciados com alta precisão e acurácia, melhores que 5 centímetros.
A startup Novarum Sky lançou uma nova solução para Georreferenciamento Direto (GD) para uso em drones de asas fixas ou rotativas para possibilitar mapas georreferenciados com alta precisão e acurácia, melhores que 5 centímetros.
Mas antes de explicar sobre a solução GD Novarum Sky, você sabe a diferença entre GD e RTK ou PPK?
Elas são técnicas diferentes. Em resumo, pode-se dizer que o GD usa a tecnologia RTK ou PPK para determinar a posição do Drone no momento da gravação da foto, mas isso não é suficiente para fazer mapas com precisão e acurácia centimétrica sem o uso de pontos de controle no solo (GCPs, na sigla em inglês).
Em PPK ou RTK, o cálculo da posição do Drone/VANTé feito periodicamente e depende da frequência de aquisição de dados dos satélites no receptor Rover GNSS instalado no Drone, portanto um receptor GNSS de 20 Hertz calcula a posição do Drone com precisão centimétrica a cada 50 milisegundos. Este tempo parece pouco, mas um Drone voando a 10 metros por segundo na direção horizontal se desloca 25 centímetros em 25 milisegundos, então neste caso o erro médio da posição do Drone no momento da foto será de 25 centímetros, portanto a precisão do mapa será decimétrica.
Para obter um mapa georreferenciado com precisão centimétrica utilizando apenas as técnicas RTK ou PPK, será necessário utilizar os GCPs para posterior utilização no software de fotogrametria que corrige as coordenadas das fotos para o nível centimétrico. Quanto menor a frequência do receptor GNSS Rover e/ou a maior velocidade de voo do Drone, pior a acurácia da solução RTK ou PPK.
A solução GD normalmente economiza 50% do tempo de trabalho no local e 50% do tempo de processamento do mapa, porque os GCPs não são necessários e a sobreposição lateral das fotos pode ser de apenas 40% e longitudinal de 60%.
Na técnica de GD, é necessário estimar a posição do Drone no momento da aquisição da foto independente da frequência do receptor do GNSS Rover e da velocidade de voo.
Os sistemas atuais de GD usam técnicas PPK ou RTK e executam algoritmos para um cálculo de posição mais preciso através dos dados gerados pelo IMU – Inertial Navigation System. Em geral, a IMU opera na frequência de 100 Hertz, portanto, fornece dados a cada 10 milisegundos para calcular a posição estimada do Drone.
Esses sistemas GD também requerem software adicional, placas proprietárias que integram o receptor GNSS Rover L1/L2 na IMU, sendo que o custo pode exceder o valor do próprio Drone.
Após três anos de pesquisa e desenvolvimento, a Novarum Sky desenvolveu uma solução GD inovadora que não usa hardware proprietário, executando solução RTK ou PPK no Raspberry Pi conectado a receptor GNSS L1@5Hz configurado para receber dados Raw de três constelações e novo software que corrige a posição do Drone no momento da exposição da foto com frequência de amostragem de 2000 Hertz.
A Novarum Sky GD não utiliza IMU, no entanto, fornece no final do fluxo de trabalho as coordenadas das fotos com precisão e acurácia melhor que 5 centímetros, portanto permitindo fazer mapa georeferenciado com acurácia centimétrica sem o uso de GCPs.
Outro fator importante é o tempo para FIX RTK que na solução DG Novarum Sky é de apenas 3 minutos. O receptor GNSS base pode ser acessado via Internet através do protocolo NTRIP ou estação GNSS base local, para a solução RTK ou PPK.
Se você quiser saber se a solução GD do fabricante permite fazer um mapa georreferenciado com precisão centimétrica, ele deve fornecer um relatório de mapa georreferenciado feito por um software de fotogrametria de primeira linha.
No relatório deve informar pelo menos:
1) que o GCP foi usado apenas para verificar a precisão da posição das fotos; e
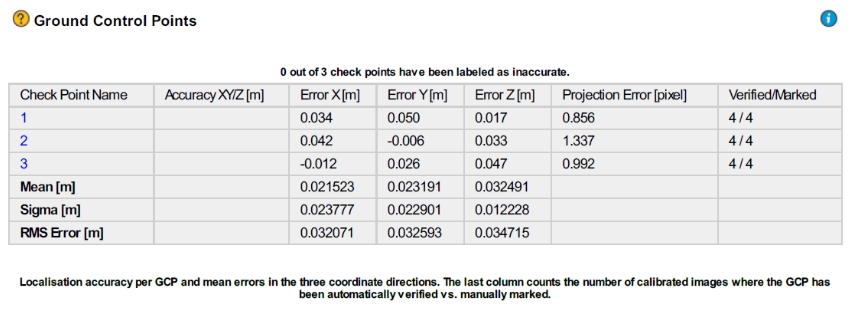
2) o Erro RMS X [m], Erro RMS Y [m] e Erro RMS Z [m] , todos os erros do RMS devem ter menos de 10 centímetros.
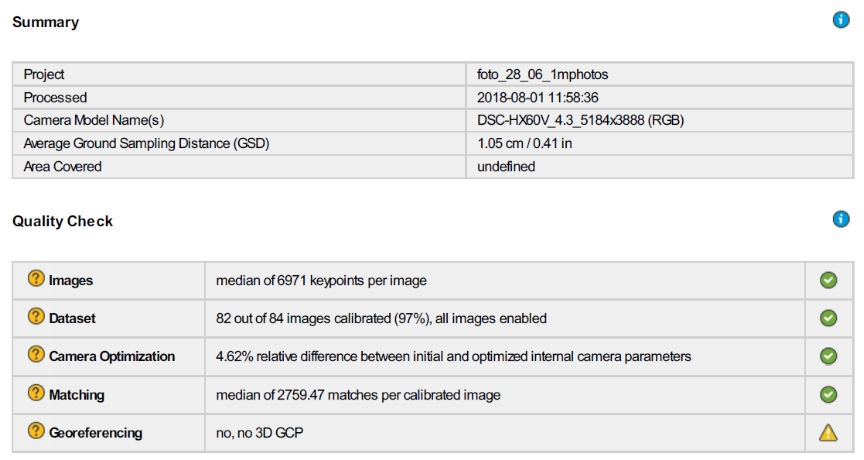
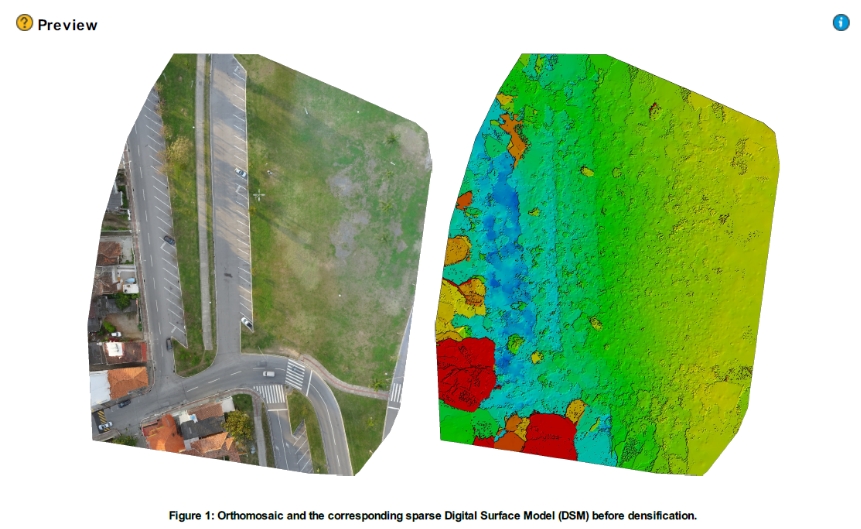
Por exemplo, a Novarum Sky fez um mapa georreferenciado usando o sistema EtheCopter GD em um Drone Mikrokopter XL Hexa voando a 8 metros por segundo, câmera Sony HX60V, três GCPs para verificação, acesso a base GNSS do IBGE via Internet e o software de fotogrametria da Pix4d. Os resultados foram um mapa georreferenciado com GSD de 1,05 centímetro e erro RMS nas coordenadas X = 3,20, Y = 3,26 e Z de 3,47 centímetros.
Veja as impressões do relatório:
*Eng. João Marcelo Corrêa, Fundador & CEO na Novarum Sky